Gabriel Garcia
Open Menu
Close Menu
Bio
Papers
Talks
Projects
Experience
Teaching
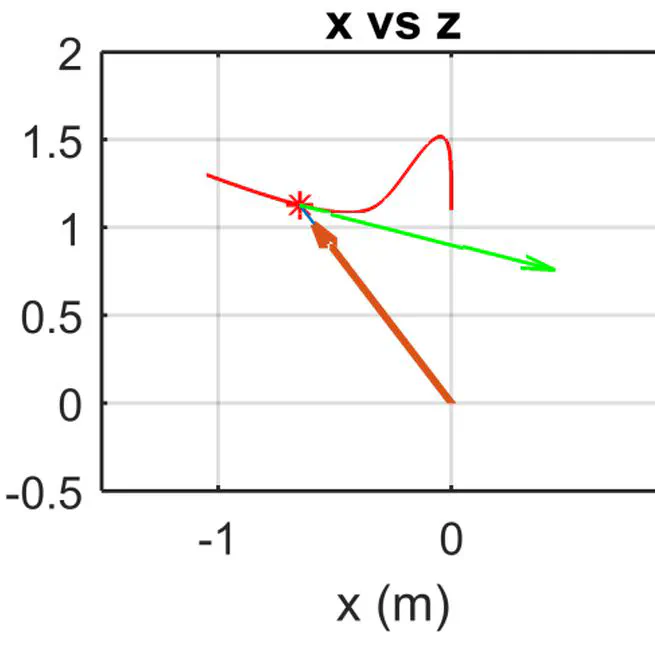
Reduced Models
A Control Approach for the Variable-Height Inverted Pendulum Based on Sliding Mode Control With Input Saturation
Oct 15, 2019