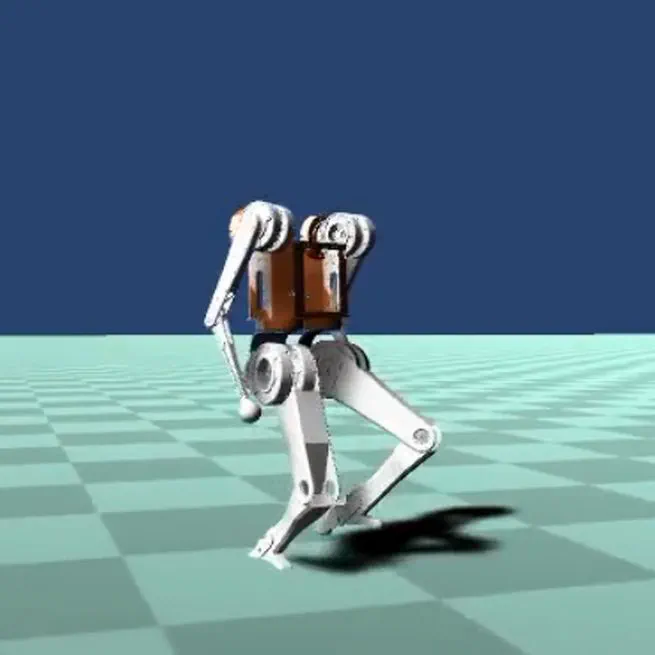
MPC-based Locomotion Control of Bipedal Robots with Line-Feet Contact using Centroidal Dynamics
Jul 19, 2021
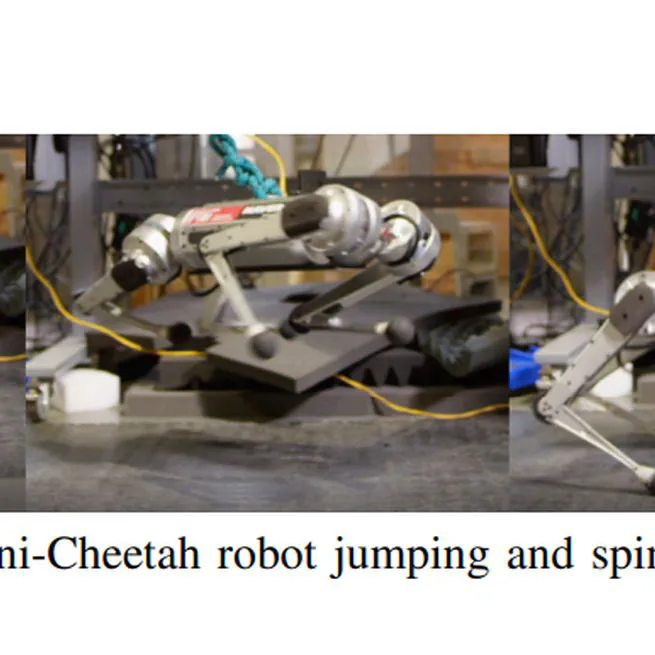
Time-Varying Model Predictive Control for Highly Dynamic Motions of Quadrupedal Robots
May 30, 2021
Torque Control in Position-Controlled Robots using an Inverse Dynamic Task
Dec 19, 2020
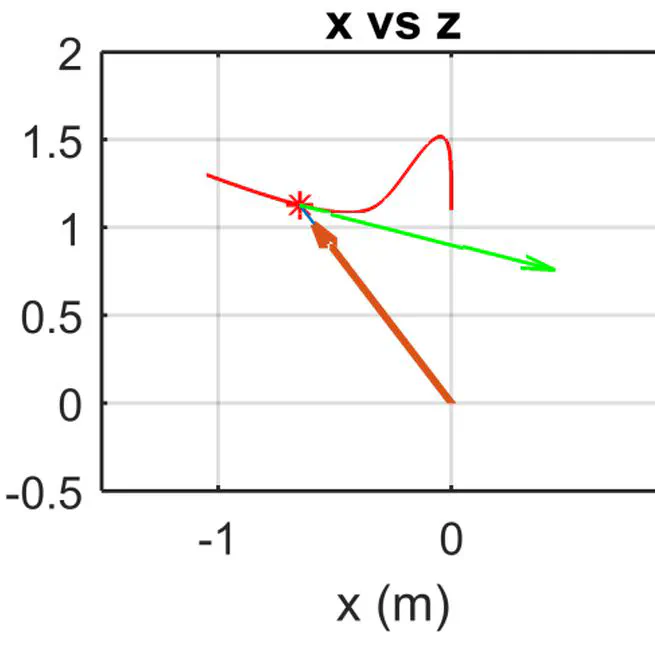
A Control Approach for the Variable-Height Inverted Pendulum Based on Sliding Mode Control With Input Saturation
Oct 15, 2019
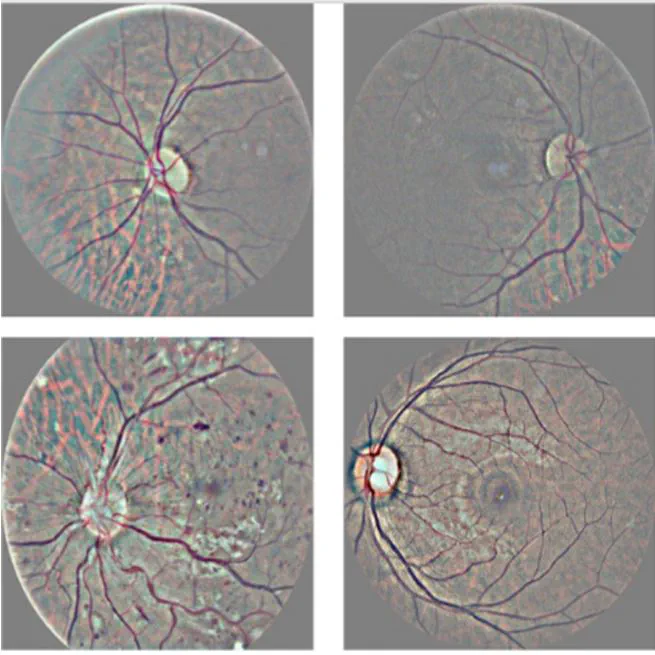
Detection of Diabetic Retinopathy Based on a Convolutional Neural Network Using Retinal Fundus Images
Oct 25, 2017
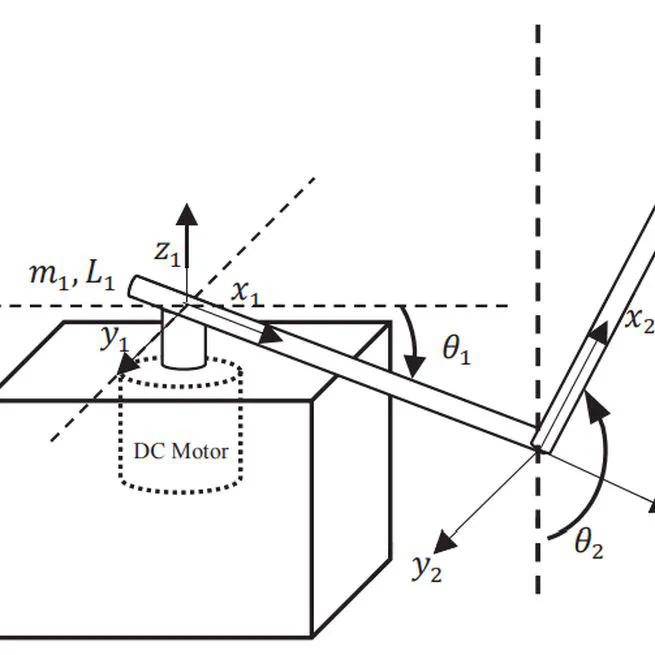
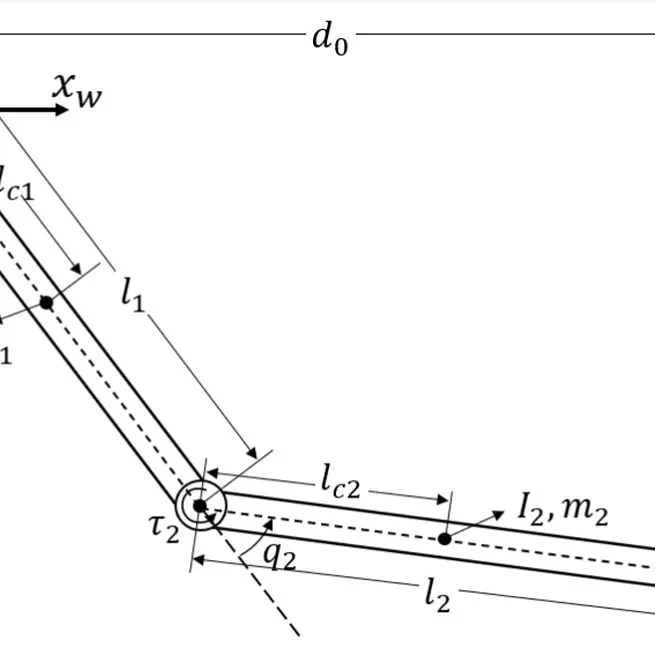
Global control for the Furuta Pendulum based on Partial Feedback Linearization and stabilization of the Zero Dynamics
Aug 20, 2017