Time-Varying Model Predictive Control for Highly Dynamic Motions of Quadrupedal Robots
 MIT MiniCheetah
MIT MiniCheetahAbstract
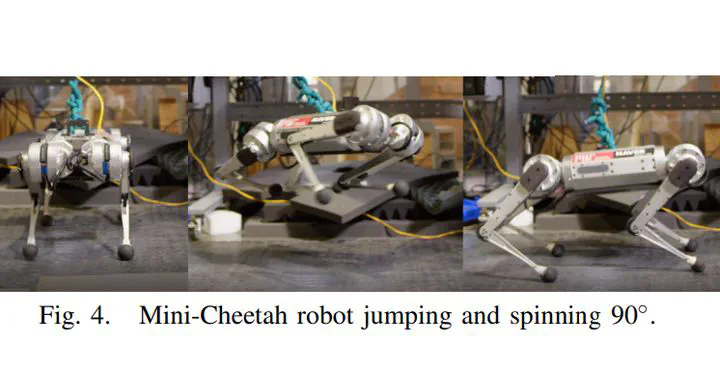
Obtaining highly dynamic motions in robots is a difficult task. In recent years, sophistication in mechanical design, improved algorithms, and high computational power allows new robots to perform natural gaits and dynamic motions such as backflips. Offline optimization is often necessary to obtain good performance in those difficult motions. However, when an athlete does a backflip, he will adapt “online” to any change, and that is shown in the robustness of the movements. One of the biggest challenges in robotics is to perform those movements using online optimization with the dynamics of the robot. Here, we present an approach to deal with complicated tasks using online optimization. We obtain 90° rotational jumps and jumps over sloped terrain in the Mini-Cheetah hardware, and online-optimized backflips, sideflips, and frontflips in a real-time physical simulator with full-body dynamics.
Type
Publication
In 2021 IEEE International Conference on Robotics and Automation (ICRA)