Global control for the Furuta Pendulum based on Partial Feedback Linearization and stabilization of the Zero Dynamics
 Furuta Pendulum
Furuta PendulumAbstract
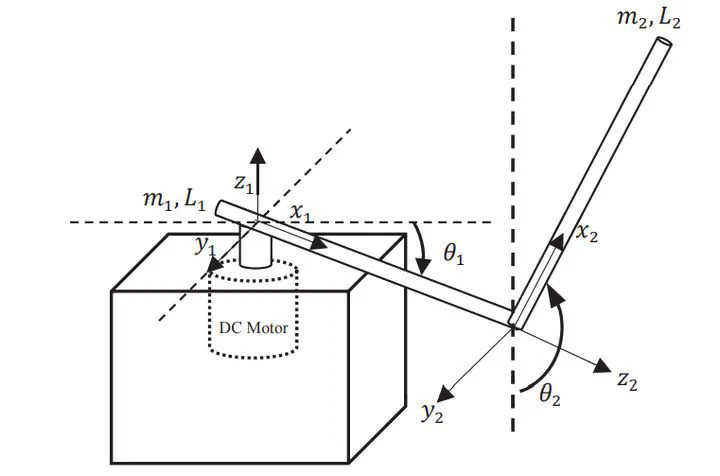
This study presents a global hybrid controller to perform swing-up and balance for the Furuta Pendulum and the problem generated by the Zero Dynamics created when Partial Feedback Linearization is performed is solved. The device is an underactuated 2-link system with one actuator on the first link. The Dynamic Analysis is performed with Lagrange Equation. With PFL, we define a state space model where we can easily control it as a simple inverted pendulum. Then, an energy-based controller is developed to reach a neighborhood of the vertical position, and we develop a new strategy of an inclination-based controller to deal with the Zero Dynamics due to PFL keeping the pendulum near to the upright position. Finally, an LQR control is used to balance the pendulu, so the resulting hybrid control assures us global stability of the system. Results were obtained from numerical simulation. This work is important because it is a base and a reference of how to deal with Unstable Zero Dynamics of an underactuated system with PFL.
Type
Publication
In 2017 13th IEEE Conference on Automation Science and Engineering (CASE)