IROS 2020: Time-Varying MPC for Dynamic Jumps with Quadruped Robots
Oct 16, 2020· ·
0 min read
·
0 min read
Gabriel Enrique Garcia Chavez
Abstract
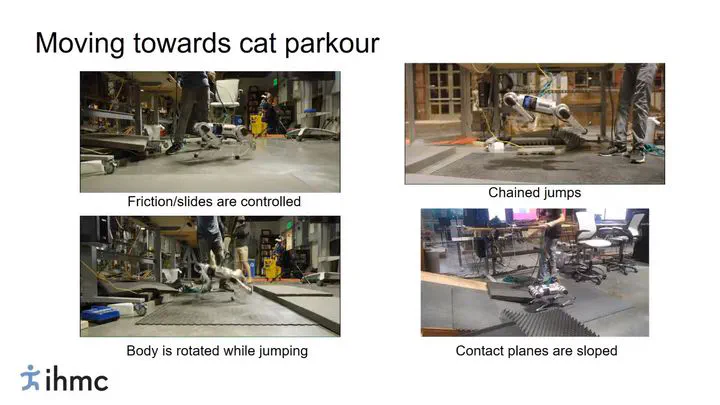
Cats can perform impressive parkour maneuvers on diverse terrain. A key component of this is the ability to calculate precise forces and translate them into highly dynamic movements such as jumping, landing, and so on. In this study, we perform basic jumps using a TV-MPC control method, given the nonlinear nature of quadruped robots.
Date
Oct 16, 2020 12:00 AM
Event