About Me
Gabriel Garcia is a professor of control and robotics at University of Engineering and Technology - UTEC. His research interests include nonlinear/online optimization, model-reduced robotics, floating-base dynamics and is currently researching on Deep Reinforcement Learning.
Interests
- Legged Locomotion of Robots
- Optimization-based Controllers
- Trajectory Optimization
- Deep Reinforcement Learning
Education
MSc. Mechanical Engineering
Virginia Tech
BSc. Mechatronics Engineering
National University of Engineering
📚 My Research
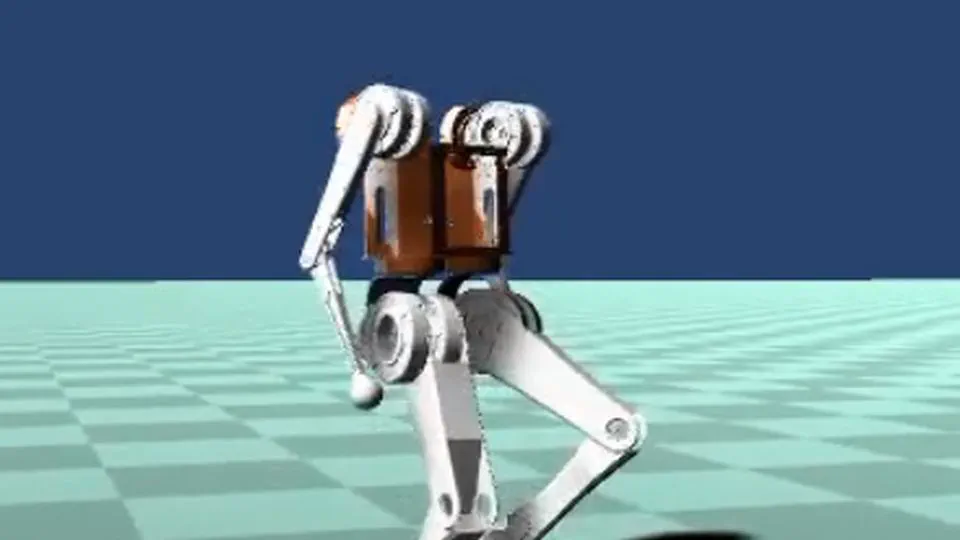
I’m a researcher focused on deploying highly dynamic robots in the real world. Tasks typically performed by humans, such as parkour, jumping, and natural gymnastics, are among my research goals for both quadrupedal and bipedal robots.
My main tools are nonlinear and optimization-based controllers, but recently, reinforcement learning has shown promising results. I’m currently working on integrating it with modern robotic controllers such as MPCs and WBCs.
Feel free to reach out if you’re interested in collaborating!
Featured Publications
Publications
(2021).
MPC-based Locomotion Control of Bipedal Robots with Line-Feet Contact using Centroidal Dynamics.
In 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids).
(2021).
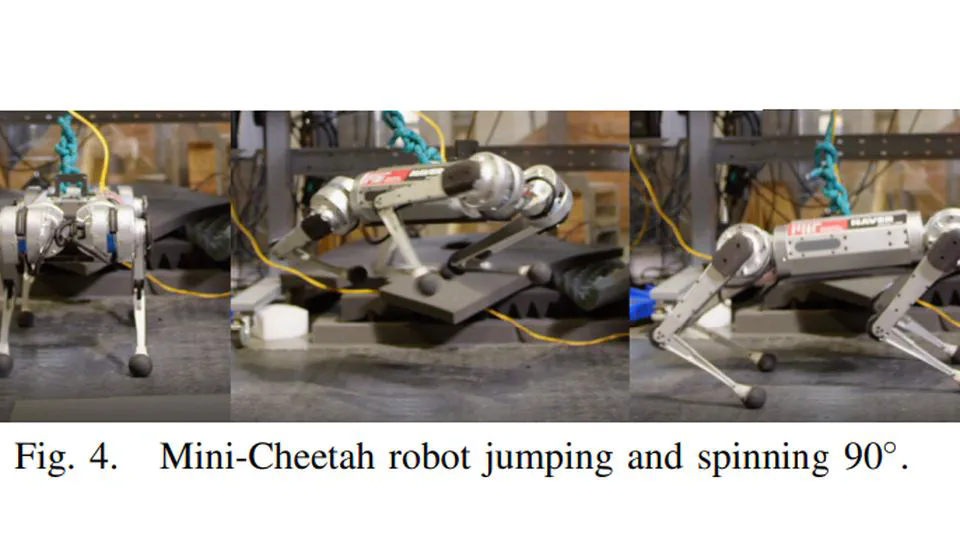
Time-Varying Model Predictive Control for Highly Dynamic Motions of Quadrupedal Robots.
In 2021 IEEE International Conference on Robotics and Automation (ICRA).
(2020).
Torque Control in Position-Controlled Robots using an Inverse Dynamic Task.
In 2020 59th IEEE Conference on Decision and Control (CDC).
(2019).
A Control Approach for the Variable-Height Inverted Pendulum Based on Sliding Mode Control With Input Saturation.
In 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids).
(2017).
Detection of Diabetic Retinopathy Based on a Convolutional Neural Network Using Retinal Fundus Images.
In 2017 International Conference on Artificial Neural Networks - ICANN 2017.
Recent & Upcoming Talks
Recent Projects
Here are some projects I have worked on this year.

Experience
Professor at ELMT Department
University of Engineering and TechnologyResponsibilities include:
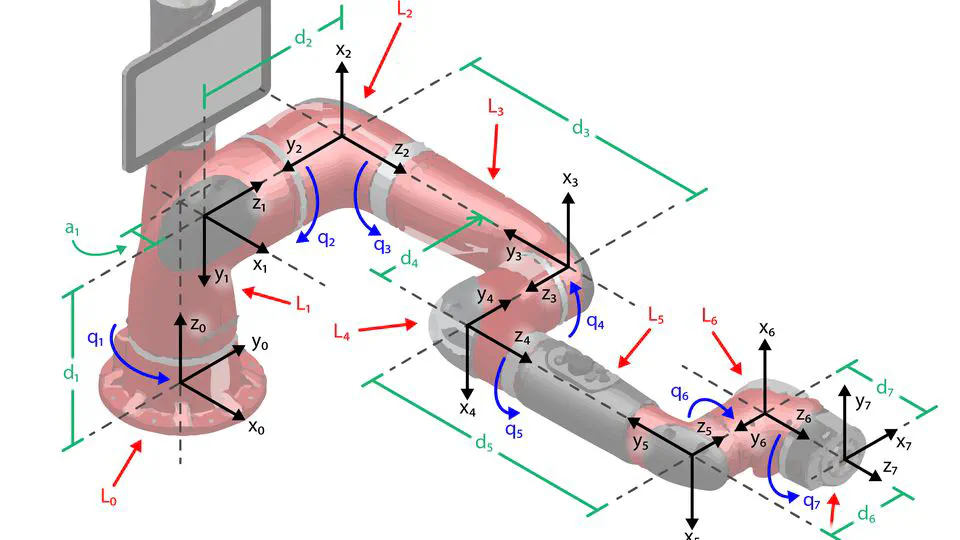
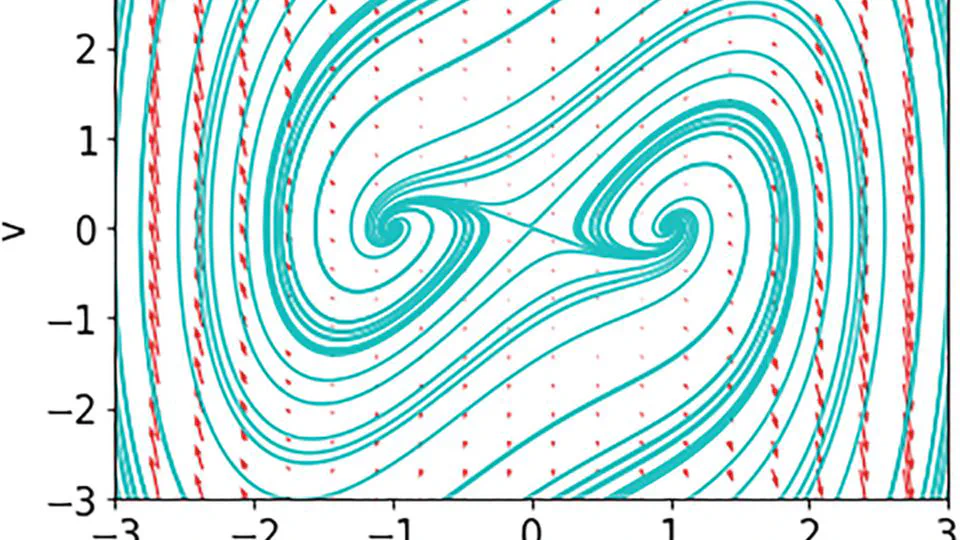
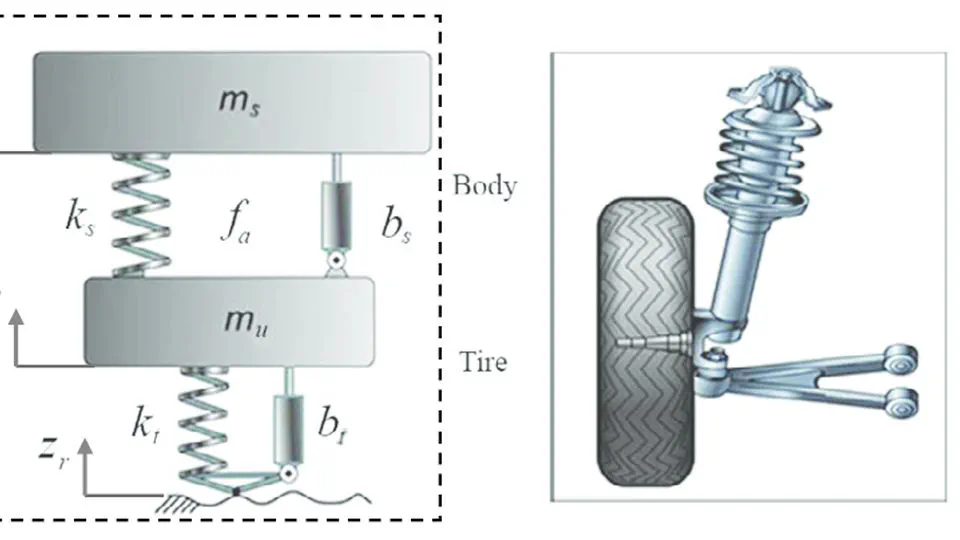
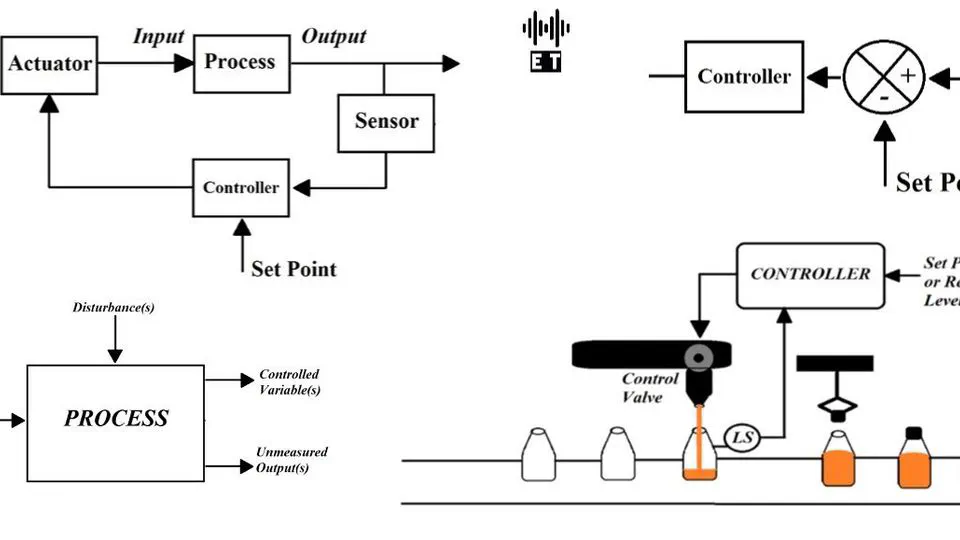
- Teaching engineering courses: Modelling and Simulation, Foundations of Robotics, Process Control, Nonlinear Control, Intelligent Control.
- Co-advising undergrad thesis: Cooling-mechanism for motors of quadrupedal robots, Optimization for dynamic feasibility of LLM-generated trajectories of a NAO Robot
Professor at FIM Department
National University of EngineeringResponsibilities include:
- Teaching engineering courses: Nonlinear Controls, Advanced Control.
- Advising a undergrad research project: Design of a Soft-Robotics Glove for Hand Rehabilitation
Software Programmer
Freelance at UpworkEngaged in diverse projects aimed at addressing complex technical challenges. Some research projects include:
- Improving Energy Efficiency of Electric Axle with MPC.
- Design, Modelling, and Locomotion Control of Crawling Robots.
- Pseudospectral Optimal Control for orbital transfer using NonLinear Optimization
- Mathematical Mesh Deformation for Enhanced 3D PDE Simulation Techniques.
Research Intern
IIT- Reviewed literature of control methods for the quadrupedal robot HyQ in order to upgrade it to current control methods for legged robots (MPC and WBC).
Graduate Research Assistant
Virginia TechResponsibilities include:
- Research on sliding contacts for robots and sensitivities on trajectory optimization.
- Evaluating students at “Senior Design Project” 4th-year undergrad.
Research Intern
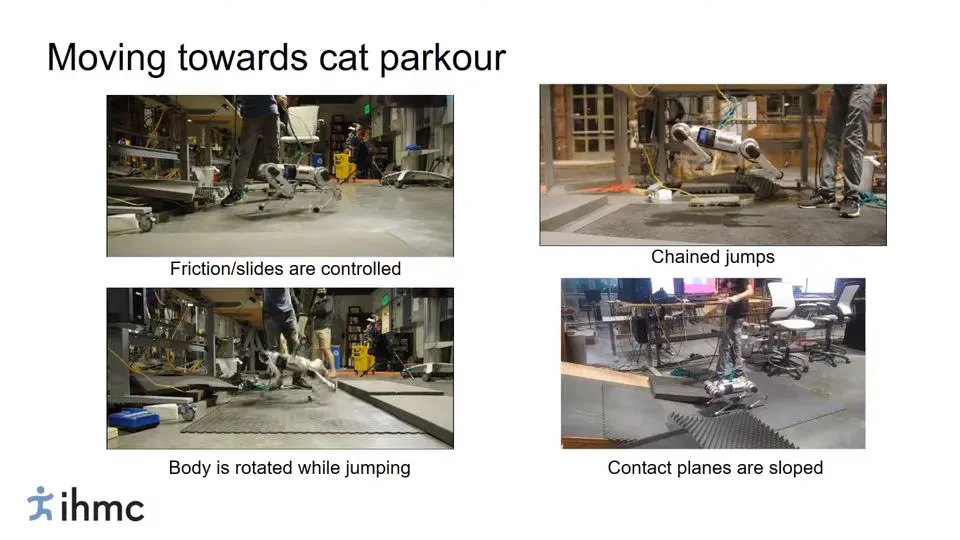
IHMCResponsibilities include:
- Develop control strategies for reduced-models of robot.
- Modifying Mini-Cheetah source code for making it able to jump, and walk over slopes.
Education
MSc. Mechanical Engineering
Virginia TechCourses included:
- Nonlinear Control Systems
- Adaptive Controls
- Convex Optimization
BSc. Mechatronics Engineering
National University of EngineeringCourses included:
- Nonlinear Controls
- Analysis and Control of Robots
- Artificial Intelligence
Teaching